
Quando si parla di tornare sulla Luna, si pensa subito a potentissimi razzi, come il SLS della NASA, il Super Heavy (BFR) della SpaceX, il CZ9 cinese o i Enisej e Don russi (di cui, come al solito, si sa poco o nulla) ed a complesse procedure, sistemi di allunaggio e navette di ritorno. Infatti, sono elementi essenziali ed indispensabili, ma non sufficienti!
Sulla Luna e dintorni bisogna muoversi, sapere dove si è e dove si deve andare. Insomma, serve un sistema di navigazione!
Tutto ciò mi ricorda un fatto emblematico accadutomi una decina di anni fa, durante una delle mie serate di astronomia ed astronautica al Parco Ferrari a Modena. Stavo illustrando la spedizione di Apollo 11 e in quel periodo i cosiddetti “complottisti” erano ancora numerosi e convinti. Uno di questi (che durante tutta la mia spiegazione mi aveva guardato con superiorità) alla fine se ne usci con un: “Si informi meglio, sono tutte balle inventate dagli americani! Mi meraviglio che lei ce le venga a raccontare”. Naturalmente ero preparato, non era la prima volta. Quindi cercai di capire quali erano le sue ragioni e la sua risposta mi stupì: “Come hanno potuto andare sulla Luna e muoversi se nel 1969 il GPS non era ancora stato inventato?” Giuro che ne avevo sentite tante dai negazionisti, ma questa mi giunse nuova. Tentai di spiegargli che non era necessario il GPS, che l’intero nostro mondo era stato mappato ed esplorato quando non c’era neanche la radio e la corrente elettrica. Non servì a nulla! Se ne andò convinto della sua tesi.
Gli dissi pure che, ci fosse anche stato il GPS, comunque, non avrebbe funzionato al di fuori della Terra. In effetti questo sistema di satelliti non è stato studiato per servire viaggi spaziali o gite fuori porta sulla Luna.
Ma la NASA si sta dando da fare parecchio per smentire questa mia tesi.
Infatti, presso il Goddard Space Flight Center di Greenbelt, nel Maryland la NASA ha una moltitudine di strumenti a sua disposizione sperimentati in mezzo secolo di esperienza per la navigazione in missioni di esplorazione spaziale in orbita lunare e sulla sua superficie. In alcuni di questi vi è pure il contributo italiano. Ma andiamo con ordine.
Durante le prossime missioni, Artemis, oltre a comprovate capacità di navigazione, utilizzerà tecnologie innovative basate su una solida combinazione di capacità per fornire la disponibilità, la resilienza e l’integrità richieste da un sistema di navigazione in situ. Alcune delle tecniche di navigazione analizzate per Artemis includono: Radiometria, ottimetria e altimetria laser.
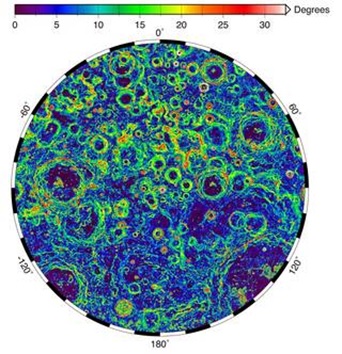
Il Lunar Orbiter Laser Altimeter (LOLA) a bordo del Lunar Reconnaissance Orbiter (LRO) invia impulsi laser sulla superficie della Luna dalla sonda in orbita. Questi impulsi rimbalzano sulla Luna e ritornano a LRO, fornendo agli scienziati misurazioni della distanza dal veicolo spaziale alla superficie lunare. Mentre LRO orbita attorno alla Luna, LOLA misura la forma della superficie lunare, che include informazioni sulle elevazioni e le pendenze della superficie lunare. Questa immagine mostra i pendii trovati vicino al Polo Sud della Luna.
Crediti: NASA / LRO
La radiometria, l’ottimetria e l’altimetria laser misurano le distanze e la velocità utilizzando le proprietà delle trasmissioni elettromagnetiche. Si misura il tempo impiegato da una trasmissione per raggiungere un veicolo spaziale e lo si divide per la velocità di spostamento della trasmissione (la velocità della luce), ricavandone una distanza.
Queste misurazioni accurate sono state le fondamenta della navigazione spaziale sin dal lancio del primo satellite, fornendo una misurazione accurata e affidabile della distanza tra il trasmettitore e il ricevitore del veicolo spaziale. Allo stesso tempo è possibile osservare la velocità di variazione della velocità del veicolo spaziale tra il trasmettitore e il veicolo spaziale a causa dell’effetto Doppler (la variazione di frequenza percepita da una sorgente in movimento).
La radiometria e l’ottimetria misurano le distanze e la velocità tra un veicolo spaziale e le antenne terrestri o altri veicoli spaziali utilizzando rispettivamente i loro collegamenti radio e i collegamenti di comunicazione ottica a infrarossi. Nell’altimetria laser e nel raggio laser spaziale un veicolo spaziale o un telescopio terrestre riflette i laser sulla superficie di un corpo celeste o un riflettore appositamente designato per giudicare le distanze.
Navigazione ottica.
Le tecniche di navigazione ottica si basano sulle immagini delle telecamere di un veicolo spaziale. Ci sono tre rami principali della navigazione ottica utilizzabili a seconda della distanza dall’obiettivo:
La navigazione ottica basata sulle stelle utilizza oggetti celesti luminosi come stelle, lune e pianeti per la navigazione (Star Trackers). Sono computer armati di obiettivi, come nella immagine, che devono puntare e seguire una o più stelle. L’angolo formato tra la direzione dell’obiettivo e la struttura del mezzo che lo ospita fornisce i valori di rollio, beccheggio ed imbardata, quindi l’assetto di un veicolo spaziale e possono definire la loro distanza dagli oggetti utilizzando gli angoli tra di loro (usati anche nel progetto Apollo).

Quando un veicolo spaziale si avvicina a un corpo celeste, l’oggetto inizia a riempire il campo visivo della telecamera. I “navigatori” (umani o computer) ricavano quindi la distanza del veicolo spaziale dal corpo usando il suo profilo – il bordo apparente del corpo – e il centroide, o centro geometrico calcolato in base all’arco.
All’approccio più vicino, Terrain Relative Navigation utilizza le immagini della telecamera e l’elaborazione del computer per identificare le caratteristiche della superficie note e calcolare la rotta di un veicolo spaziale in base alla posizione di tali caratteristiche nei modelli o nelle immagini di riferimento. Anche questo usato su Apollo.
Segnale debole GPS e GNSS.
Infine, “udite udite”, la NASA sta sviluppando capacità che consentiranno alle missioni sulla Luna di sfruttare i segnali delle costellazioni del Global Navigation Satellite System (GNSS) come il GPS USA. Questi segnali, già utilizzati su molti veicoli spaziali in orbita attorno alla Terra, miglioreranno i tempi, la precisione del posizionamento e aiuteranno i sistemi di navigazione autonomi nello spazio cislunare e lunare.
Ma come faranno ad utilizzare i segnali dei satelliti GPS che hanno le loro antenne rivolte verso la superfice terrestre?
La NASA ha esplorato la fattibilità dell’utilizzo di segnali del lobo laterale (SIDE LOBE) dal lato opposto della Terra, per la navigazione ben al di fuori di quello che era stato considerato il volume del servizio spaziale e nello spazio lunare. Negli ultimi anni, la Missione Magnetosferica Multiscala (MMS) ha persino determinato con successo la sua posizione utilizzando segnali GPS a distanze quasi a metà strada Terra-Luna.
Oltre i 1.800 miglia di altitudine, la navigazione con GPS diventa più impegnativa. Questa distesa di spazio è chiamata Space Service Volume e si estende da 1.800 fino a circa 22.000 miglia (36.000 km) o orbita geosincrona.
Ad altitudini oltre le costellazioni GNSS stesse gli utenti devono iniziare a fare affidamento sui segnali ricevuti dal lato opposto della Terra.
Dal lato opposto del globo la Terra blocca gran parte dei segnali GNSS (vedi figura in basso), quindi i veicoli nel volume del servizio spaziale devono “ascoltare” i segnali che si estendono ai lati della Terra, che si estendono ad angolo rispetto alle antenne GNSS.
Formalmente la ricezione GNSS nel volume del servizio spaziale si basa sui segnali ricevuti entro circa 26 gradi dal segnale più forte delle antenne. Tuttavia, la NASA ha avuto un notevole successo utilizzando segnali del lobo laterale GNSS più deboli (che si estendono ad un angolo ancora maggiore dalle antenne) per la navigazione dentro e oltre il volume del servizio spaziale.
Dagli anni ’90 gli ingegneri della NASA hanno lavorato per comprendere le capacità di questi lobi laterali. In preparazione per il lancio del primo satellite meteorologico Geostationary Operational Environmental Satellite-R nel 2016 la NASA ha cercato di documentare meglio la forza e la natura dei lobi laterali per determinare se il satellite possa soddisfare i suoi requisiti.
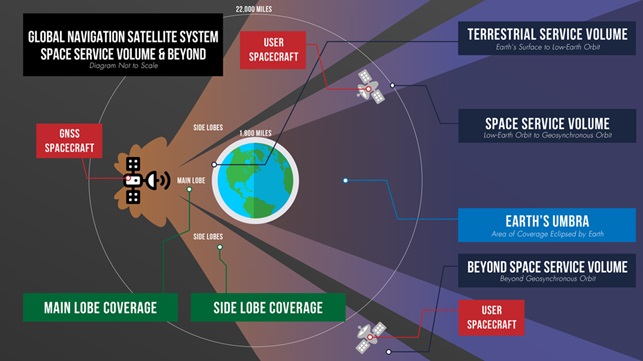
Un grafico che dettaglia le diverse aree di copertura GNSS.
Crediti: NASA
I “navigatori” della NASA hanno simulato la disponibilità del segnale GNSS vicino alla Luna. La loro ricerca indica che questi segnali GNSS possono svolgere un ruolo fondamentale nelle ambiziose iniziative di esplorazione lunare della NASA fornendo accuratezza e precisione senza precedenti (l’avessi saputo 10 anni fa non avrei infierito così tanto sul povero complottista!)
La NASA sta lavorando ad un approccio interoperabile che consentirebbe alle missioni lunari di sfruttare più costellazioni contemporaneamente. I veicoli spaziali vicino alla Terra ricevono abbastanza segnali da una singola costellazione per calcolare la loro posizione. Tuttavia, a distanze lunari, i segnali GNSS sono meno numerosi. Le simulazioni mostrano che l’utilizzo di segnali da più costellazioni migliorerebbe la capacità delle missioni di calcolare la loro posizione in modo coerente.
Per dimostrare e testare questa capacità sulla Luna, la NASA sta progettando il Lunar GNSS Receiver Experiment (LuGRE), sviluppato in collaborazione con l’Agenzia Spaziale Italiana (eccoci qua! Ci siamo anche noi!)
LuGRE volerà su una delle missioni commerciali Lunar Payload Services della NASA e prevede di farlo atterrare sul bacino del Mare Crisium della Luna nel 2023.
LuGRE riceverà segnali sia dal GPS che da Galileo (il GNSS gestito dall’Unione Europea).
I dati raccolti verranno utilizzati per sviluppare sistemi GNSS lunari operativi per future missioni sulla Luna.
Servizi di navigazione LunaNet

LunaNet è un’architettura di comunicazione e navigazione unica sviluppata dal programma Space Communications and Navigation (SCaN) della NASA. Gli standard, i protocolli ed i requisiti di interfaccia comuni di LunaNet estenderanno l’internetworking alla Luna offrendo flessibilità e accesso ai dati senza precedenti.
Per la navigazione l’approccio LunaNet offre indipendenza operativa e maggiore precisione combinando molti dei metodi di cui sopra in un’architettura senza soluzione di continuità.
Il software di navigazione autonoma sfrutta misurazioni come radiometria, navigazione celeste, altimetria, navigazione relativa al terreno e GNSS per eseguire la navigazione a bordo senza contatto con operatori o risorse sulla Terra e consentendo ai veicoli spaziali di manovrare indipendentemente dai controllori della missione terrestre.
Questo livello di autonomia consente la reattività all’ambiente spaziale dinamico.
La navigazione autonoma può essere particolarmente utile per l’esplorazione dello spazio profondo, dove il ritardo delle comunicazioni può ostacolare la navigazione in situ. Ad esempio, le missioni su Marte devono attendere da otto a 48 minuti per le comunicazioni di andata e ritorno con la Terra, a seconda delle dinamiche orbitali. Durante le manovre critiche i veicoli spaziali necessitano del processo decisionale immediato che il software autonomo può fornire.
Insomma, anche sulla Luna o su Marte avremo un dispositivo, come quello nella illustrazione, che pur non essendo un GPS ci garantirà più o meno lo stesso servizio con qualche cosa in più
Commentato da Luigi Borghi.
Link correlati