C’è voluto mezzo secolo per superare la risoluzione e la sensibilità del radiotelescopio di Arecibo a Portorico. Ci ha pensato il FAST cinese di 500 metri e la natura con il tornado che ha definitivamente messo la parola fine ad Arecibo (forse).
Questi radiotelescopi terrestri hanno tutti un paio di problemi abbastanza invadenti.
Il primo: le emissioni elettromagnetiche provocate dall’uomo e dalle sue attività. Ovviamente queste intrusioni, questi “disturbi” vengono filtrati ed esclusi dal segnale che si vuole realmente vedere ma questo comporta comunque una riduzione delle loro capacità ed anche, a volte, sovrapposizione e ambiguità del risultato.
Secondo: la barriera degli strati alti della ionosfera che riflette verso l’esterno le onde lunghe provenienti dallo spazio. La stessa che, dal basso, consente ad un radioamatore di arrivare in tutto il mondo utilizzando appunto la riflessione verso il basso che in questo caso è di aiuto.
Ma c’è un posto qui vicino a noi (abbastanza) che è “pulito” da elettromagnetismo androgeno o di origine artificiale provocato da tecnologia terrestre: la faccia nascosta della Luna!
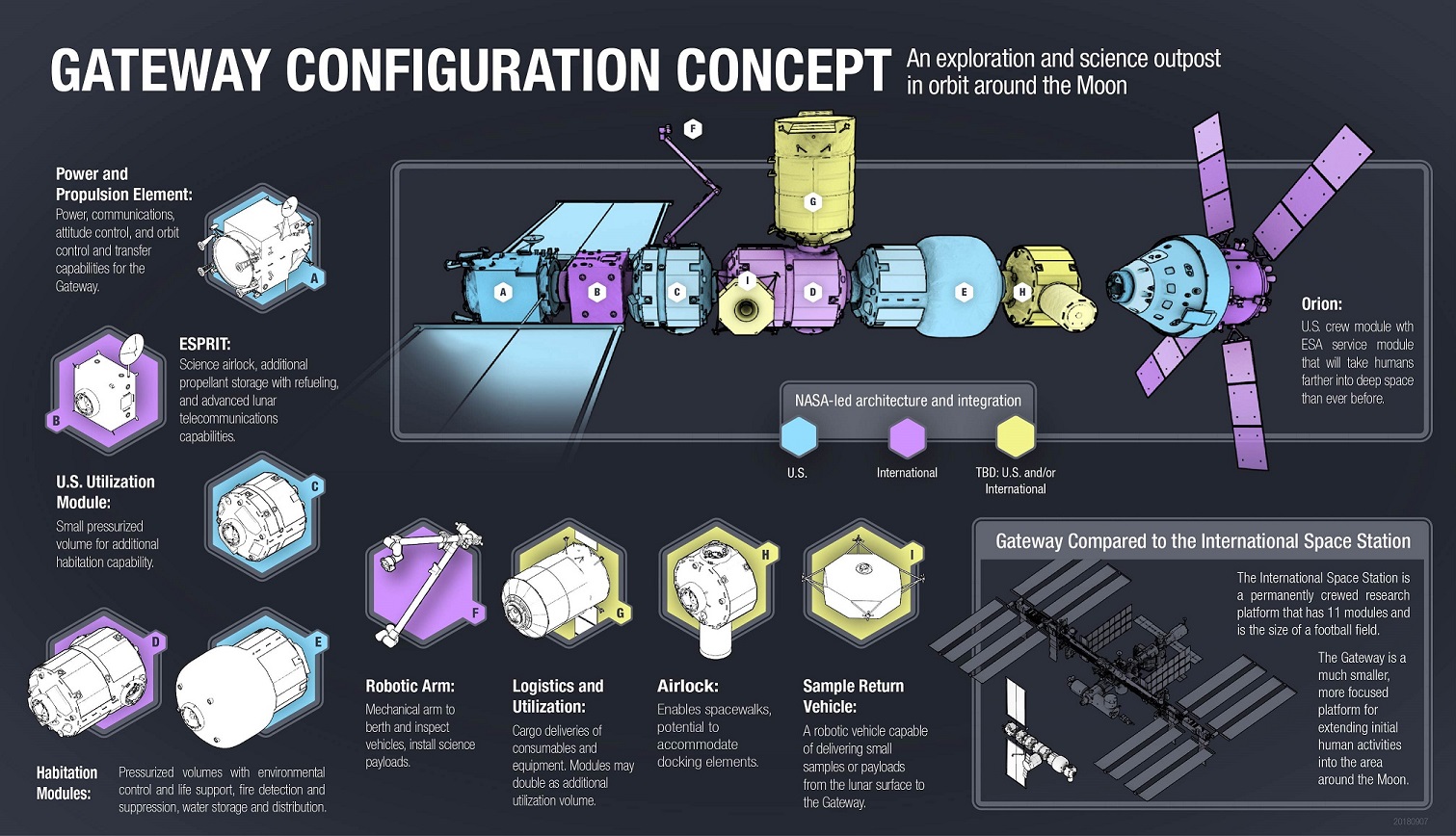
Un sogno pensato e ridiscusso da molto tempo, ma ora la NASA ha cominciato ad investire in questo progetto per arrivare ad una proposta fattibile ed economicamente accettabile.
Il concetto iniziale della NASA potrebbe vedere dei robot appendere una rete metallica in un cratere sul lato più lontano della Luna, creando un potentissimo radiotelescopio in grado di sondare lo spazio fino all’alba dell’universo.
Dopo anni di sviluppo, il progetto Lunar Crater Radio Telescope (LCRT) ha ricevuto $ 500.000 per supportare il lavoro aggiuntivo mentre entra nella Fase II del programma Innovative Advanced Concepts (NIAC) della NASA.

Questa illustrazione mostra un radiotelescopio concettuale del cratere lunare sul lato opposto della Luna.
L’obiettivo principale dell’LCRT sarebbe quello di misurare le onde radio a lunga lunghezza d’onda generate in un periodo che è durato alcune centinaia di milioni di anni dopo il Big Bang, ma prima che le prime stelle iniziassero a lampeggiare.
I cosmologi sanno poco di questo periodo, ma le risposte ad alcuni dei più grandi misteri della scienza potrebbero essere rinchiuse nelle emissioni radio a lunga lunghezza d’onda generate dal gas che avrebbe riempito l’universo durante quel periodo.
“Anche se non c’erano stelle, c’era una grande quantità di idrogeno durante quel breve periodo dell’universo – idrogeno che alla fine sarebbe servito come materia prima per le prime stelle”, ha detto Joseph Lazio, radioastronomo del Jet Propulsion Laboratory della NASA nel sud della California e membro del team LCRT. “Con un radiotelescopio sufficientemente grande al largo della Terra, potremmo seguire i processi che avrebbero portato alla formazione delle prime stelle, forse anche trovare indizi sulla natura della materia oscura”.
I radiotelescopi sulla Terra non possono sondare questo periodo misterioso perché le onde radio a lunga lunghezza d’onda di quell’era vengono riflesse da uno strato di ioni ed elettroni nella parte superiore della nostra atmosfera, la ionosfera.
Le emissioni radio casuali della nostra rumorosa civiltà possono interferire anche con la radioastronomia, soffocando i segnali più deboli.
Ma sul lato più lontano della Luna, non c’è atmosfera che rifletta questi segnali e la Luna stessa bloccherebbe le “chiacchiere” radio dell’umanità sull Terra.
Il lato lunare più lontano potrebbe essere la prima postazione fissa per condurre studi senza precedenti sull’universo primordiale.
Saptarshi Bandyopadhyay, un tecnologo di robotica al JPL e ricercatore capo del progetto LCRT ha detto: “I radiotelescopi sulla Terra non possono vedere le onde radio cosmiche di circa 10 metri o più (< 30 MHz) a causa della nostra ionosfera, quindi c’è un’intera regione dell’universo che semplicemente non possiamo vedere. Ma le idee precedenti di costruire un’antenna radio sulla Luna erano molto complesse e impegnative in termini di risorse, quindi siamo stati costretti a inventare qualcosa di diverso”.
Costruire telescopi con i robot.
Per essere sensibile alle lunghe lunghezze d’onda radio, l’LCRT dovrebbe essere enorme.
L’idea è di creare un’antenna di oltre 1 chilometro di larghezza in un cratere di oltre 3 chilometri di larghezza.
I più grandi radiotelescopi a parabola singola sulla Terra, come il telescopio con apertura di 500 metri (FAST) in Cina e l’ormai inoperativo di 305 metri di larghezza ad Arecibo a Porto Rico – sono stati costruiti all’interno di depressioni naturali simili a scodelle nel paesaggio per fornire una struttura di supporto.
Questa classe di radiotelescopi utilizza migliaia di pannelli riflettenti sospesi all’interno della depressione per rendere l’intera superficie dell’antenna riflettente alle onde radio. Il ricevitore si sospende quindi tramite un sistema di cavi in un punto focale sopra la parabola, ancorato da torri al perimetro della parabola, per misurare le onde radio che rimbalzano sulla superficie curva sottostante.
Ma nonostante le sue dimensioni e complessità, anche FAST non è sensibile alle lunghezze d’onda radio più lunghe di circa 4,3 metri (< 69 MHz).
Il team di ingegneri, robotisti e scienziati del JPL, ha condensato e concentrato questa classe di radiotelescopi fino alla sua forma più elementare. Il loro concetto elimina la necessità di trasportare materiale pesantemente proibitivo sulla Luna e utilizza robot per automatizzare il processo di costruzione.
Invece di utilizzare migliaia di pannelli riflettenti per focalizzare le onde radio in arrivo, l’LCRT sarebbe costituito da una sottile rete metallica al centro del cratere.
Un veicolo spaziale consegnerebbe la rete e un lander separato depositerà rover DuAxel per costruire la parabola per diversi giorni o settimane.
DuAxel, un concetto robotico in fase di sviluppo presso JPL, è composto da due rover ad asse singolo (chiamati Axel) che possono sganciarsi l’uno dall’altro ma rimanere collegati tramite un cavo. Una metà fungerebbe da ancora sul bordo del cratere mentre l’altra si cala in corda doppia per costruire l’edificio. In questo filmato lo vediamo all’opera nel deserto del Mojave in California, due ore di auto a sud di Las Vegas.

La superficie della Luna è coperta di crateri, e una delle depressioni naturali potrebbe fornire una struttura di supporto per un piatto del radiotelescopio. Come mostrato in questa illustrazione, i rover DuAxel potevano ancorare la rete metallica dal bordo del cratere.
Credits: Vladimir Vustyansky
“DuAxel risolve molti dei problemi associati alla sospensione di un’antenna così grande all’interno di un cratere lunare”, ha detto Patrick Mcgarey, un tecnologo di robotica al JPL e membro del team dei progetti LCRT e DuAxel. “I singoli rover Axel possono entrare nel cratere mentre sono legati, collegarsi ai cavi, applicare tensione e sollevare i cavi per sospendere l’antenna”.
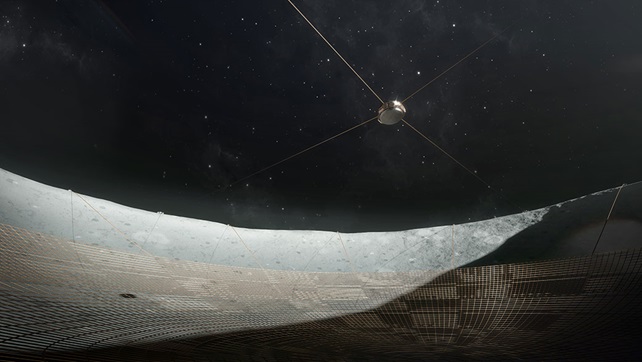
In questa illustrazione, il ricevitore può essere visto sospeso sopra il piatto tramite un sistema di cavi ancorati al bordo del cratere.
Credits: Vladimir Vustyansky.
Identificare le sfide.
Affinché il team possa portare il progetto al livello successivo, utilizzerà i finanziamenti della Fase II del NIAC per affinare le capacità del telescopio e i vari approcci di missione identificando le sfide lungo il percorso.
Una delle maggiori sfide del team durante questa fase è la progettazione della rete metallica.
Per mantenere la sua forma parabolica e la precisa spaziatura tra i fili, la rete deve essere resistente e flessibile, ma abbastanza leggera da poter essere trasportata.
La maglia deve anche essere in grado di sopportare i mostruosi cambiamenti di temperatura sulla superficie della Luna – da un minimo di – 173 gradi Celsius a un massimo di + 127 gradi Celsius – senza deformazioni o cedimenti.
Un’altra sfida è identificare se i rover DuAxel devono essere completamente automatizzati o se sia necessario coinvolgere un operatore umano nel processo decisionale.
La costruzione DuAxels potrebbe essere completata anche da altre tecniche di costruzione?
Sparare arpioni sulla superficie lunare, ad esempio, può ancorare meglio la rete dell’LCRT, richiedendo meno robot.
Inoltre, per ora, il lato lunare è “radio silenzioso”, ciò però potrebbe cambiare in futuro.
L’agenzia spaziale cinese ha attualmente una missione che esplora quel lato lunare lontano, dopotutto, e l’ulteriore sviluppo della superficie lunare potrebbe avere un impatto su possibili progetti di radioastronomia.
Per i prossimi due anni, il team LCRT lavorerà per identificare anche altre sfide e domande. Se avranno successo, potranno essere selezionati per un ulteriore sviluppo.
Patrick Mcgarey ha detto: “Lo sviluppo di questo concetto potrebbe produrre alcune scoperte significative lungo il percorso, in particolare per le tecnologie di distribuzione e l’uso di robot per costruire strutture gigantesche al largo della Terra. Sono orgoglioso di lavorare con questo team diversificato di esperti che ispirano il mondo a pensare a grandi idee che possono fare scoperte rivoluzionarie sull’universo in cui viviamo”.
NIAC è finanziato dalla direzione della missione della tecnologia spaziale della NASA, che è responsabile dello sviluppo delle nuove tecnologie e capacità trasversali necessarie all’agenzia.
Commentato da Luigi Borghi.
Link correlati
https://www.nasa.gov/feature/jpl/lunar-crater-radio-telescope-illuminating-the-cosmic-dark-ages